

 联系我们
联系我们

安川机器人在正常开机时有时会出现一些轻微报警,本文针对常见的几个报警代码进行分析解释,帮助大家去理解并更加有效地应用安川机器人。本文以机型MOTOMINI为例子,由于该机型S\R\B\T轴未安装抱闸,因此这些轴在有重力负载情况下,伺服关闭或者切断电源时,因重力负载的影响会导致机器人姿势发生改变,同时将有可能出现下文所述报警。
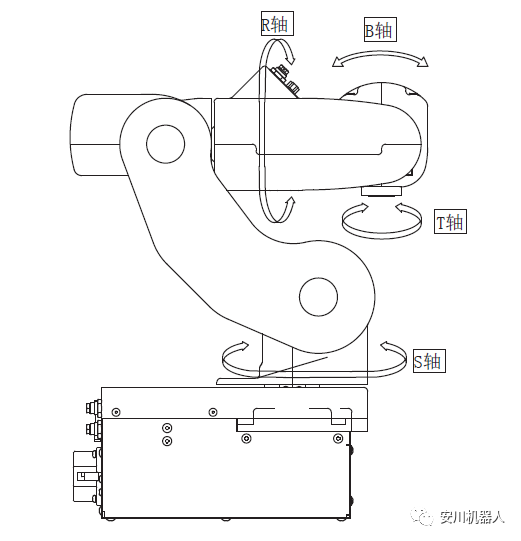
Tips:其余机型虽然S\R\B\T轴安装了抱闸,但是如果由于负载超过额定负载、或者受到较大外力作用时,机器人将会出现和MOTOMINI相同的状况,即发生不同程度转动、位移。因此此类报警原因亦可参考本文。
报警代码-4511
---下降量超出允许范围
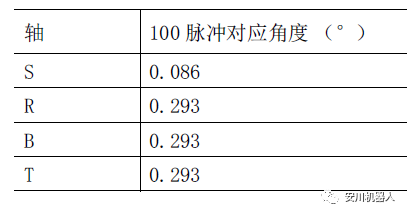
接通伺服时,上次伺服关闭和这次伺服接通时的机器人位置的脉冲差值超过100时会发生该报警。点击示教器页面的【重置】,重置报警后重新接通伺服电源即可。100脉冲对应的MOTOMINI的各轴角度如下表所示,以供参考:
报警代码-4307
---伺服关闭速度异常
接通伺服时,电机处于未静止状态并正在转动时发生报警,请确认机器人静止后再接通伺服电源即可。
报警代码-4107
---***值允许范围异常
机器人当前位置在切断电源时的位置和接通电源时的位置脉冲差值超过4096时会发生该报警。点击示教器页面的【重置】,重置报警后进入【第二原点】进行位置确认,重新接通伺服电源即可。
Tips:【第二原点】进行位置确认方法参考往期文章《第二原点位置确认》。
总结结论
未搭载抱闸的对象轴上有重力负载的情况下,接通电源或者伺服接通时,有可能发生上述报警,因此在不使用机器人或者待机状态下时,建议将机器人调整到对象轴在无重力负载姿势,参考文中图。
- 下一篇:安川机器人总线通信之 Modbus TCP
- 上一篇:安川SP100B机器人防护服
